Hejsan svejsan!
Idag har jag fått tummen ur så att säga. Kanske beror det på att jag har varit sjuk och därför fått tid att vila upp mig lite, så nu är jag full av energi trots post-förkylningssymptom!
Jag har varit i USA i lite över en månad nu, och jag har fortfarande inte riktigt förklarat vad jag gör här. Därför tänkte jag att jag skulle berätta om det idag!
Som ni kanske redan vet, så gör jag mitt examensarbete på NASA. NASA har många center runt om hela USA, och det som jag är på heter Ames Research Center och ligger i San Francisco, Kalifornien. Det är egentligen en gammal militärbas och är hyfsat stort, jag tror att det jobbar omkring 2000-3000 personer här. Såhär ser det ut från luften:

Högst upp till höger i bild ser ni att det är ett flygfält. Det hyrs numera av Google, det är där alla deras toppchefer har sina privatplan. Fancy. Jag har inget privatplan, utan jag lever fattigmanslivet i en av barackerna som man inte kan se på bild. Här är det verkligen inte fancy. Men jag klagar inte, jag är glad att vara här!
Den stora, trattformade byggnaden över till vänster i bild är inget mindre än världens största vindtunnel! NASA gör inte bara rymdgrejer, de jobbar också med aeromekanik och flygplans osv. I den här vindtunneln får en hel Boeing 737 plats. Imponerande.
Jag jobbar inte alls med det, dock! Mitt labb ligger i en av kontorshusen bakom vindtunneln, för det är där Intelligent Robotics Group håller till. Där håller de på med massor av spännande projekt, ett exempel är en liten robot som ska flyga runt på Internationella Rymdstationen och hjälpa astronauter, Astrobee. Jag jobbar inte med det dock, utan med sk. ‘tensegrity robots’. Vad fan är det, tänker du. Det tänkte jag också, för jag hade aldrig hört talas om det innan jag började här!
Tensegrity robots är robotar som är väldigt flexibla, stöttåliga och fungerar inte riktigt som de robotar man har på exempelvis Mars idag. En av de största svårigheterna med att sätta en rover, som tex Curiosity på Mars yta är att få den dit utan att ta sönder den. Eftersom atmosfären på Mars har mycket lägre tryck än vad Jordens atmosfär har, har fallskärmar inte samma effekt och det är svårt att sakta ner rovern så att den landar säkert. Det här är ett stort problem, för man måste ha särskilda landningsmoduler som sen förkastas efter landningen. De är stora, tunga och framförallt dyra. Om roboten i sig är stöttålig slipper man en stor del av den här kostnaden, vilket är en anledning till att tensegrity robots är bra! Här är ett exempel på hur de kan se ut:
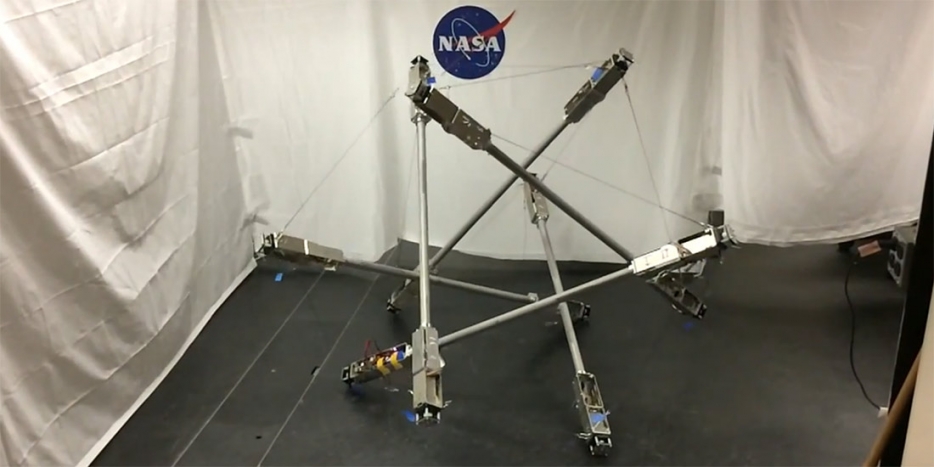
På bilden ses SUPERball v1, och som ni kan se består den av sex stycken aluminiumstavar som är sammankopplade med kablar. De har kablarna kan dras in och ut, vilket resulterar i att roboten “tippar över”, och på så sätt har den tagit ett steg framåt. Ni kanske kan tänka er att om man släpper den här roboten från hög höjd så går den inte sönder på samma sätt som Curiosity skulle göra!

En annan fördel med tensegrity robots är att de kan ta sig fram i svår terräng, vilket traditionella robotar inte kan. Säg att man har en koloni på Mars där några astronauter bor, och några kilometer bort ligger en stor krater. En av sidorna av kratern ligger i permanent skugga, och av någon mystisk anledning finns det is där som aldrig smälter. Kanske finns där till och med liv? Problemet är att man inte kan skicka astronauterna dit, för kraterns väggar är branta och det skulle vara väldigt farligt. Traditionella rovrar kan inte heller åka dit, och vi har inga drönare som kan lyfta sin egen vikt i den tunna atmosfären. Det är här man kan skicka dit en tensegrity robot!
Roboten kan nästan slängas ner i kratern utan att gå sönder, och genom komplicerade artificiell intelligens-algoritmer kan den själv lära sig hur man klättrar upp ur kratern. Väl där nere kan den ta mätvärden av isen och den omkringliggande marken.
Artificiell intelligens – det är det jag jobbar med!
Min uppgift är att försöka använda artificiell intelligens så att roboten själv ska kunna lära sig hur den ska dra i kablarna för att kunna röra sig så effektivt som möjligt. Den sortens robot jag jobbar med existerar bara i simuleringar än så länge, för den har 12 stycken aluminiumstavar till skillnad från SUPERball som har 6 stycken. Såhär ser den ut i simuleringen:

Jag kan sen programmera roboten att dra i kablarna på olika sätt för att få den att röra sig åt olika håll.
Mitt team består just nu av tre personer, där de andra två jobbar på SUPERball v2! Den finns på riktigt, och för några veckor sedan var vi ute och testade den i det sk. Roverscape, vilket är en inhägnad bit mark som ska se ut som exempelvis Mars. Såhär såg det ut då. Som ni kan se rör sig roboten väldigt “ryckigt” just nu, och de håller på att jobba på att få den att rulla bättre.
Avslutningsvis vill jag säga att jag lär mig otroligt mycket av att vara här, och att det verkligen är en dröm att få jobba med detta! Tänk den dagen vi har människor på Mars, och att de förhoppningsvis då kan skicka ut sina tensegrity robots för att utforska intressant platser. Då har jag hjälpt till med det!

Credit: NASA, M. Daly (Berkeley)

2 Comments
Ingbritt Andersson · March 18, 2018 at 7:19 am
Verkligen rätt tjej på rätt plats. Så kul Hanna.
Hur länge är du där.
Ingbritt fd Rimforsa
Hannah Petersson · March 22, 2018 at 1:02 am
Tack Ingbritt! Jag kommer att vara här till den 25 maj. :) Ha det bra!